

This well-known problem (see for instance [1],[2]) models the ascent of a rocket through the atmosphere, and we restrict here ourselves to vertical (monodimensional) trajectories.
The state variables are the altitude, speed and mass of the rocket during the flight, for a total dimension of 3. The rocket is subject to gravity, thrust and drag forces. The final time is free, and the objective is to reach a certain altitude with a minimal fuel consumption, ie a maximal final mass. All units are renormalized.
\(
(P_3) \left \lbrace
\begin{array}{l}
\max \ m(T)\\
\dot r = v\\
\dot v = – \frac{1}{r^2} + \frac{1}{m} (T_{max} u – D(r,v))\\
\dot m = – b u\\
u(\cdot)\in [0,1]\\
r(0) = 1, \ v(0)=0, m(0)=1,\\
r(T) = 1.01\\
D(r(\cdot),v(\cdot)) \le C\\
T\ free
\end{array}
\right .
\)
The drag is \(D(r,v):=Av^2\rho(r)\), with the volumic mass is \(\rho(r) := exp(-k*(r-r0))\).
We use the parameters \(b=7, T_{max}=3.5, A=310, k=500, r0=1\).
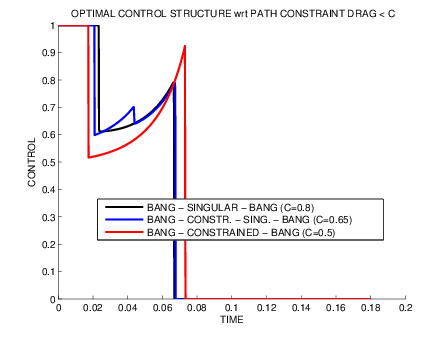
The Hamiltonian is an affine function of the control, so singular arcs may occur. We consider here a path constraint limiting the value of the drag effect: \(D(r,v) \le C\). We see that depending on the value of C, the control structure changes. In the unconstrained case, the optimal trajectory presents a singular arc with a non-maximal thrust. When C is set under the maximal value attained by the drag in the unconstrained case, a constrained arc appears. If C is small enough, the singular arc is completely replaced by the constrained arc.
Numerical simulations:
Discretization: Gauss 4th order with 1000 steps.
Depending on the value of C, the optimal control structure changes from Bang-Singular-Bang to Bang-Constrained-Bang.

References
[1] R.H. Goddard. A Method of Reaching Extreme Altitudes, volume 71(2) of Smithsonian Miscellaneous Collections. Smithsonian institution, City of Washington, 1919.
[2] H. Seywald and E.M. Cliff. Goddard problem in presence of a dynamic pressure limit. Journal of Guidance, Control, and Dynamics, 16(4):776–781, 1993.