
We study here the delay problem studied in [1] and [2], originating from [4]. The aim is to find the optimal harvesting of a renewable ressource whose growth follows a logistic function. Denoting \(x\) the biomass of population and \(u\) the harvesting effort, the optimal control problem is stated as
\(
\left \lbrace
\begin{array}{l}
Min\ \int_0^T e^{-\beta t}(C_E\frac{u(t)^3}{x(t)} -pu(t))dt +0.1 T^2\\
\dot x = a x(t) (1 – \frac{x(t-h)}{b}) – u(t)\\
x(t) = 2\ \forall t \in [-h,0] \quad,\quad x(t) \ge 2\ \forall t \in [0,T]\\
u(t) \ge 0\ \forall t \in [0,T]\\
T\ free.
\end{array}
\right.
\)
with the harvesting cost \(C_E=0.2\), the growth rates \(a=3,b=5\), the discount rate \(\beta=0.05\) and market price \(p=2\), and the growth delay \(h=0.5\). Bocop can handle the delayed term \(x(t-h)\) without having to perform the classical Guinn transformation ([3]), but for a fixed final time only. Therefore we perform a batch of optimizations for \(T\in[1,20]\), and iterate the process for \(T\in[11,13]\) to find a better estimate of the optimal time. Batch optimizations indicate an optimal final time \(T^*\approx12.24\) with an objective \(J^*=-26.15\).
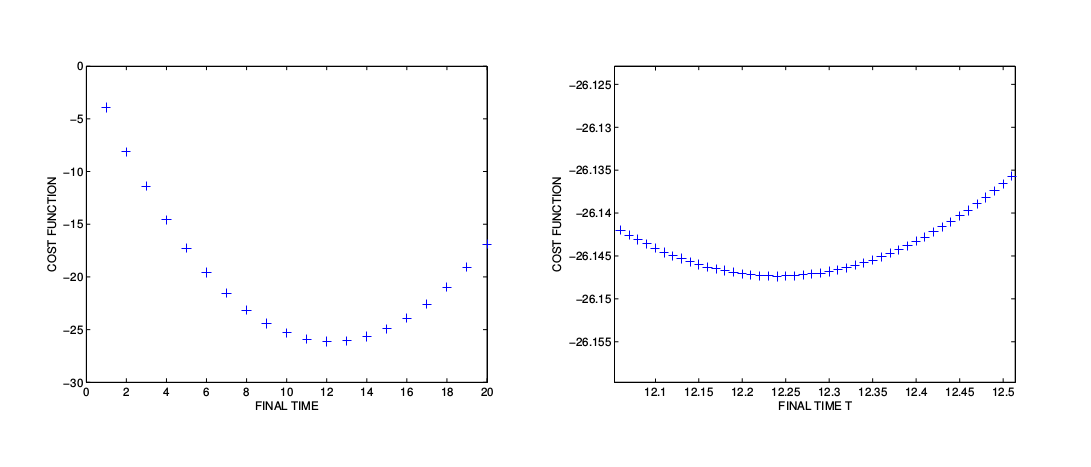
Fig1: Delay problem. Cost function with respect to final time T.
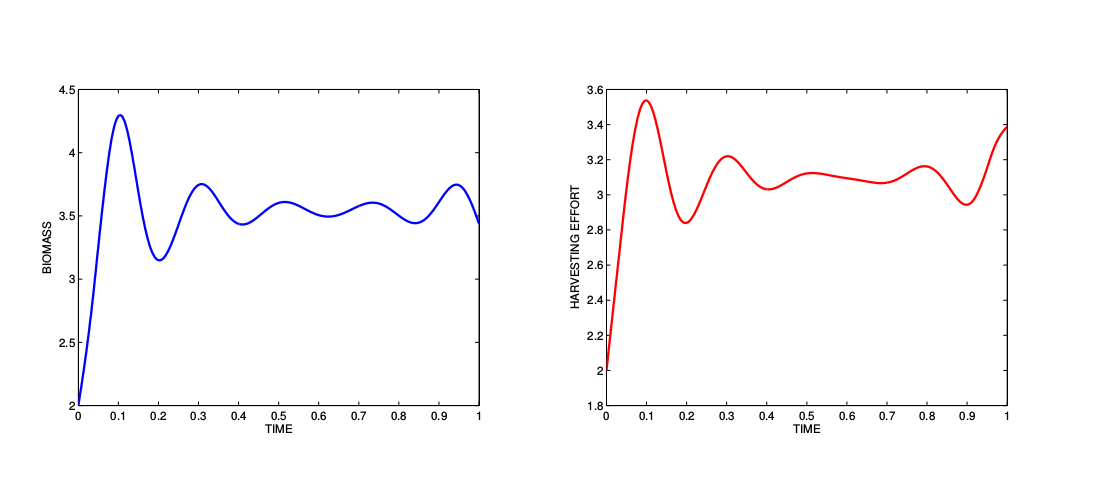
Fig2: Delay problem. Optimal state and control for T = 12.24.
References
[1] A. Boccia, P. Falugi, H. Maurer, and R. Vinter. Free time optimal control problems with time delays. pages 520–525. IEEE, 2013.
[2] L. Goellmann, D. Kern, and H. Maurer. Optimal control problems with delays in state and control variables subject to mixed control-state constraints. Optimal Control Applications and Methods, 30(4):341–365, 2009.
[3] T. Guinn. Reduction of delayed optimal control problems to non-delayed problems. Journal of Optimization Theory and Applications, 18(3):371–377, 1976.
[4] R. May. Stability and Complexity in Model Ecosystems. 1975.